Adding Depth - Z axis Demo 14¶
Objective¶
Do the same stuff as the previous demo, but use 3D coordinates, where the negative z axis goes into the screen (because of the right hand rule). Positive z comes out of the monitor towards your face.
Things that this demo doesn’t end up doing correctly:
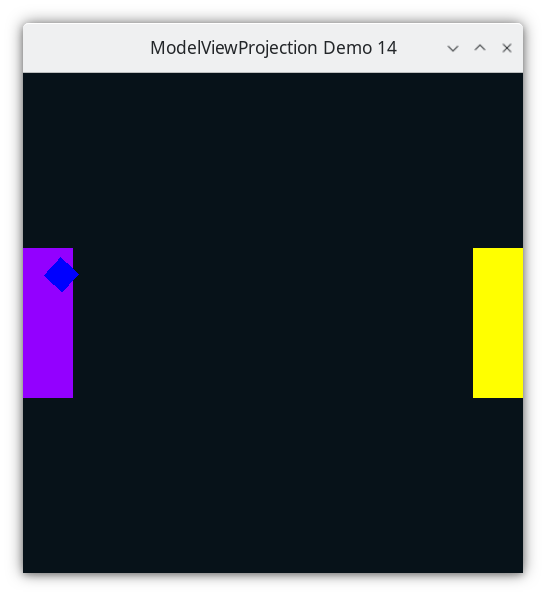
The blue square is always drawn, even when its z-coordinate in world space is less than the paddle’s. The solution will be z-buffering https://en.wikipedia.org/wiki/Z-buffering, and it is implemented in the next demo.
Demo 14¶
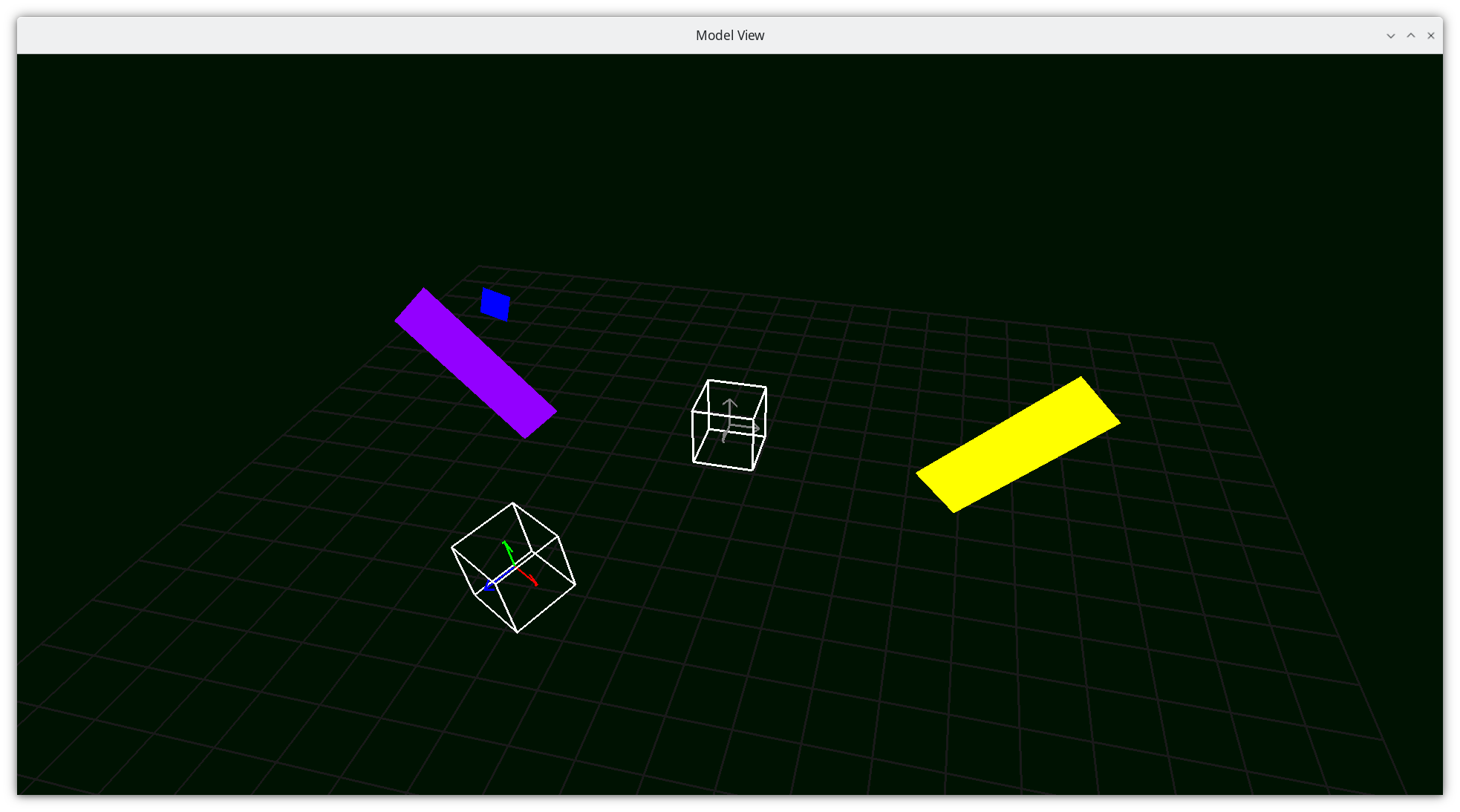
Camera Space¶
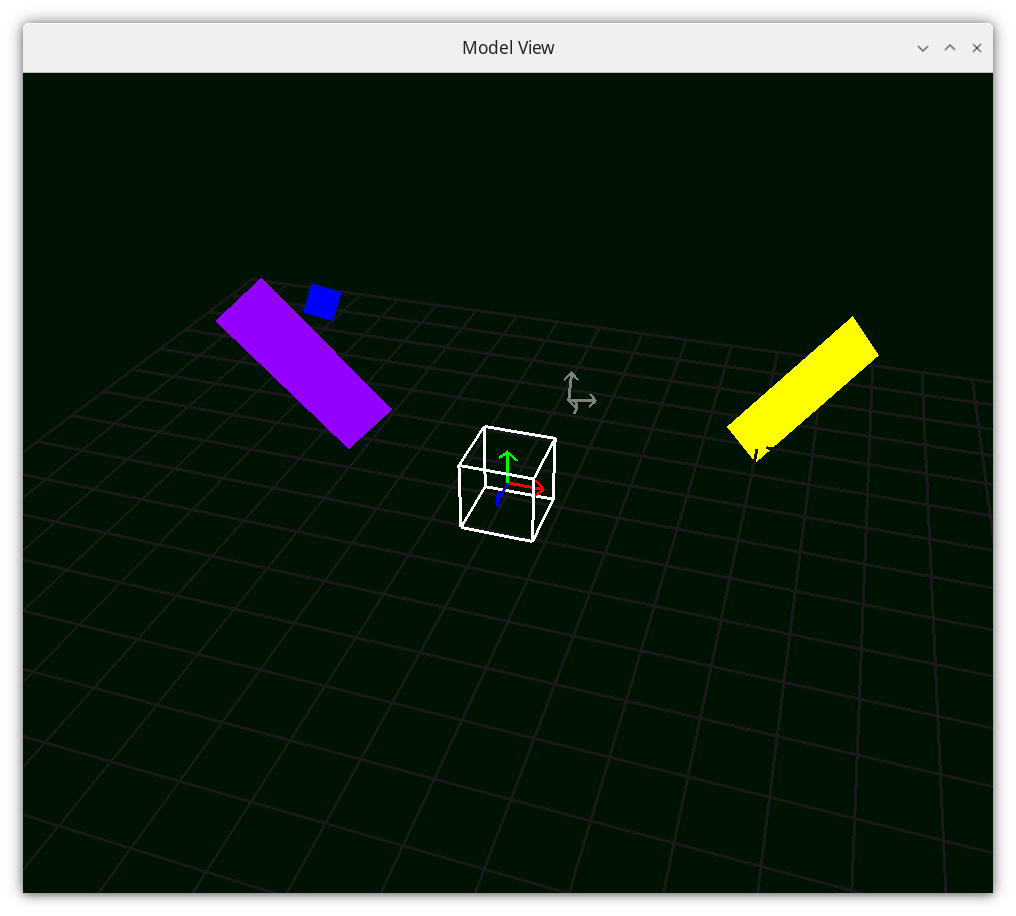
Camera Space¶
How to Execute¶
Load src/modelviewprojection/demo14.py in Spyder and hit the play button.
Move the Paddles using the Keyboard¶
Keyboard Input |
Action |
|---|---|
w |
Move Left Paddle Up |
s |
Move Left Paddle Down |
k |
Move Right Paddle Down |
i |
Move Right Paddle Up |
d |
Increase Left Paddle’s Rotation |
a |
Decrease Left Paddle’s Rotation |
l |
Increase Right Paddle’s Rotation |
j |
Decrease Right Paddle’s Rotation |
UP |
Move the camera up, moving the objects down |
DOWN |
Move the camera down, moving the objects up |
LEFT |
Move the camera left, moving the objects right |
RIGHT |
Move the camera right, moving the objects left |
q |
Rotate the square around its center |
e |
Rotate the square around paddle 1’s center |
Description¶
Vector data will now have an X, Y, and Z component.
Rotations around an angle in 3D space follow the right hand rule. Here’s a link to them in matrix form, which we have not yet covered.
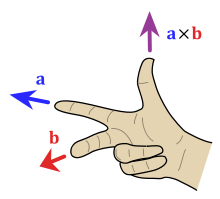
With open palm, fingers on the x axis, rotating the fingers to y axis, means that the positive z axis is in the direction of the thumb. Positive Theta moves in the direction that your fingers did.
starting on the y axis, rotating to z axis, thumb is on the positive x axis.
starting on the z axis, rotating to x axis, thumb is on the positive y axis.
65@dataclasses.dataclass
66class Vector3D(mu2d.Vector2D):
67 z: float #: The z-component of the 3D Vector
Rotate Z¶
Rotate Z is the same rotate that we’ve used so far, but doesn’t affect the z component at all.

144def rotate_z(angle_in_radians: float) -> mu.InvertibleFunction:
145 def create_rotate_function(r) -> typing.Callable[[mu.Vector], mu.Vector]:
146 def f(vector: mu.Vector) -> mu.Vector:
147 assert isinstance(vector, Vector3D)
148 xy_on_xy: mu.Vector = mu2d.Vector2D(x=vector.x, y=vector.y)
149 rotated_xy_on_xy: mu.Vector = r(xy_on_xy)
150 assert isinstance(rotated_xy_on_xy, mu2d.Vector2D)
151 return Vector3D(
152 x=rotated_xy_on_xy.x, y=rotated_xy_on_xy.y, z=vector.z
153 )
154
155 return f
156
157 r: mu.InvertibleFunction = mu2d.rotate(angle_in_radians)
158 return mu.InvertibleFunction(
159 create_rotate_function(r), create_rotate_function(mu.inverse(r))
160 )
Rotate X¶

103def rotate_x(angle_in_radians: float) -> mu.InvertibleFunction:
104 def create_rotate_function(r) -> typing.Callable[[mu.Vector], mu.Vector]:
105 def f(vector: mu.Vector) -> mu.Vector:
106 assert isinstance(vector, Vector3D)
107 yz_on_xy: mu.Vector = mu2d.Vector2D(x=vector.y, y=vector.z)
108 rotated_yz_on_xy: mu.Vector = r(yz_on_xy)
109 return Vector3D(
110 x=vector.x, y=rotated_yz_on_xy.x, z=rotated_yz_on_xy.y
111 )
112
113 return f
114
115 r = mu2d.rotate(angle_in_radians)
116 return mu.InvertibleFunction(
117 create_rotate_function(r), create_rotate_function(mu.inverse(r))
118 )
Rotate Y¶

123def rotate_y(angle_in_radians: float) -> mu.InvertibleFunction:
124 def create_rotate_function(r) -> typing.Callable[[mu.Vector], mu.Vector]:
125 def f(vector: mu.Vector) -> mu.Vector:
126 assert isinstance(vector, Vector3D)
127 zx_on_xy: mu.Vector = mu2d.Vector2D(x=vector.z, y=vector.x)
128 rotated_zx_on_xy: mu.Vector = r(zx_on_xy)
129 assert isinstance(rotated_zx_on_xy, mu2d.Vector2D)
130 return Vector3D(
131 x=rotated_zx_on_xy.y, y=vector.y, z=rotated_zx_on_xy.x
132 )
133
134 return f
135
136 r = mu2d.rotate(angle_in_radians)
137 return mu.InvertibleFunction(
138 create_rotate_function(r), create_rotate_function(mu.inverse(r))
139 )
Scale¶
464def uniform_scale(m: float) -> InvertibleFunction:
465 def f(vector: Vector) -> Vector:
466 return vector * m
467
468 def f_inv(vector: Vector) -> Vector:
469 if m == 0.0:
470 raise ValueError("Not invertible. Scaling factor cannot be zero.")
471
472 return vector * (1.0 / m)
473
474 return InvertibleFunction(f, f_inv)
Code¶
The only new aspect of the code below is that the paddles have a z-coordinate of 0 in their modelspace.
94paddle1: Paddle = Paddle(
95 vertices=[
96 mu3d.Vector3D(x=-1.0, y=-3.0, z=0.0),
97 mu3d.Vector3D(x=1.0, y=-3.0, z=0.0),
98 mu3d.Vector3D(x=1.0, y=3.0, z=0.0),
99 mu3d.Vector3D(x=-1.0, y=3.0, z=0.0),
100 ],
101 color=colorutils.Color3(r=0.578123, g=0.0, b=1.0),
102 position=mu3d.Vector3D(x=-9.0, y=0.0, z=0.0),
103)
104
105paddle2: Paddle = Paddle(
106 vertices=[
107 mu3d.Vector3D(x=-1.0, y=-3.0, z=0.0),
108 mu3d.Vector3D(x=1.0, y=-3.0, z=0.0),
109 mu3d.Vector3D(x=1.0, y=3.0, z=0.0),
110 mu3d.Vector3D(x=-1.0, y=3.0, z=0.0),
111 ],
112 color=colorutils.Color3(r=1.0, g=1.0, b=0.0),
113 position=mu3d.Vector3D(x=9.0, y=0.0, z=0.0),
114)
The only new aspect of the square below is that the paddles have a z-coordinate of 0 in their modelspace. N.B that since we do a sequence transformations to the modelspace data to get to world-space coordinates, the X, Y, and Z coordinates are subject to be different.
119@dataclasses.dataclass
120class Camera:
121 position_ws: mu3d.Vector3D = dataclasses.field(
122 default_factory=lambda: mu3d.Vector3D(x=0.0, y=0.0, z=0.0)
123 )
124
125
126camera: Camera = Camera()
The camera now has a z-coordinate of 0 also.
130square: list[mu3d.Vector3D] = [
131 mu3d.Vector3D(x=-0.5, y=-0.5, z=0.0),
132 mu3d.Vector3D(x=0.5, y=-0.5, z=0.0),
133 mu3d.Vector3D(x=0.5, y=0.5, z=0.0),
134 mu3d.Vector3D(x=-0.5, y=0.5, z=0.0),
135]
Event Loop¶
188while not glfw.window_should_close(window):
...
Draw Paddle 1
208 GL.glColor3f(*iter(paddle1.color))
209 GL.glBegin(GL.GL_QUADS)
210 for p1_v_ms in paddle1.vertices:
211 ms_to_ndc: mu3d.InvertibleFunction = mu3d.compose(
212 [
213 # camera space to NDC
214 mu3d.uniform_scale(1.0 / 10.0),
215 # world space to camera space
216 mu3d.inverse(mu3d.translate(camera.position_ws)),
217 # model space to world space
218 mu3d.compose(
219 [
220 mu3d.translate(paddle1.position),
221 mu3d.rotate_z(paddle1.rotation),
222 ]
223 ),
224 ]
225 )
226
227 paddle1_vector_ndc: mu3d.Vector3D = ms_to_ndc(p1_v_ms)
228 GL.glVertex3f(
229 paddle1_vector_ndc.x, paddle1_vector_ndc.y, paddle1_vector_ndc.z
230 )
231 GL.glEnd()
The square should not be visible when hidden behind the paddle1, as we do a translate by -1. But in running the demo, you see that the square is always drawn over the paddle.
Draw the Square
235 # draw square
236 GL.glColor3f(0.0, 0.0, 1.0)
237 GL.glBegin(GL.GL_QUADS)
238 for ms in square:
239 ms_to_ndc: mu3d.InvertibleFunction = mu3d.compose(
240 [
241 # camera space to NDC
242 mu3d.uniform_scale(1.0 / 10.0),
243 # world space to camera space
244 mu3d.inverse(mu3d.translate(camera.position_ws)),
245 # model space to world space
246 mu3d.compose(
247 [
248 mu3d.translate(paddle1.position),
249 mu3d.rotate_z(paddle1.rotation),
250 ]
251 ),
252 # square space to paddle 1 space
253 mu3d.compose(
254 [
255 mu3d.translate(mu3d.Vector3D(x=0.0, y=0.0, z=-1.0)),
256 mu3d.rotate_z(rotation_around_paddle1),
257 mu3d.translate(mu3d.Vector3D(x=2.0, y=0.0, z=0.0)),
258 mu3d.rotate_z(square_rotation),
259 ]
260 ),
261 ]
262 )
263 square_vector_ndc: mu3d.Vector3D = ms_to_ndc(ms)
264 GL.glVertex3f(
265 square_vector_ndc.x, square_vector_ndc.y, square_vector_ndc.z
266 )
267 GL.glEnd()
This is because without depth buffering, the object drawn last clobbers the color of any previously drawn object at the pixel. Try moving the square drawing code to the beginning, and you will see that the square can be hidden behind the paddle.
Draw Paddle 2
271 # draw paddle 2
272 GL.glColor3f(*iter(paddle2.color))
273 GL.glBegin(GL.GL_QUADS)
274 for p2_v_ms in paddle2.vertices:
275 ms_to_ndc: mu3d.InvertibleFunction = mu3d.compose(
276 [
277 # camera space to NDC
278 mu3d.uniform_scale(1.0 / 10.0),
279 # world space to camera space
280 mu3d.inverse(mu3d.translate(camera.position_ws)),
281 # model space to world space
282 mu3d.compose(
283 [
284 mu3d.translate(paddle2.position),
285 mu3d.rotate_z(paddle2.rotation),
286 ]
287 ),
288 ]
289 )
290
291 paddle2_vector_ndc: mu3d.Vector3D = ms_to_ndc(p2_v_ms)
292 GL.glVertex3f(
293 paddle2_vector_ndc.x, paddle2_vector_ndc.y, paddle2_vector_ndc.z
294 )
295 GL.glEnd()
Added translate in 3D. Added scale in 3D. These are just like the 2D versions, just with the same process applied to the z axis.
They direction of the rotation is defined by the right hand rule.